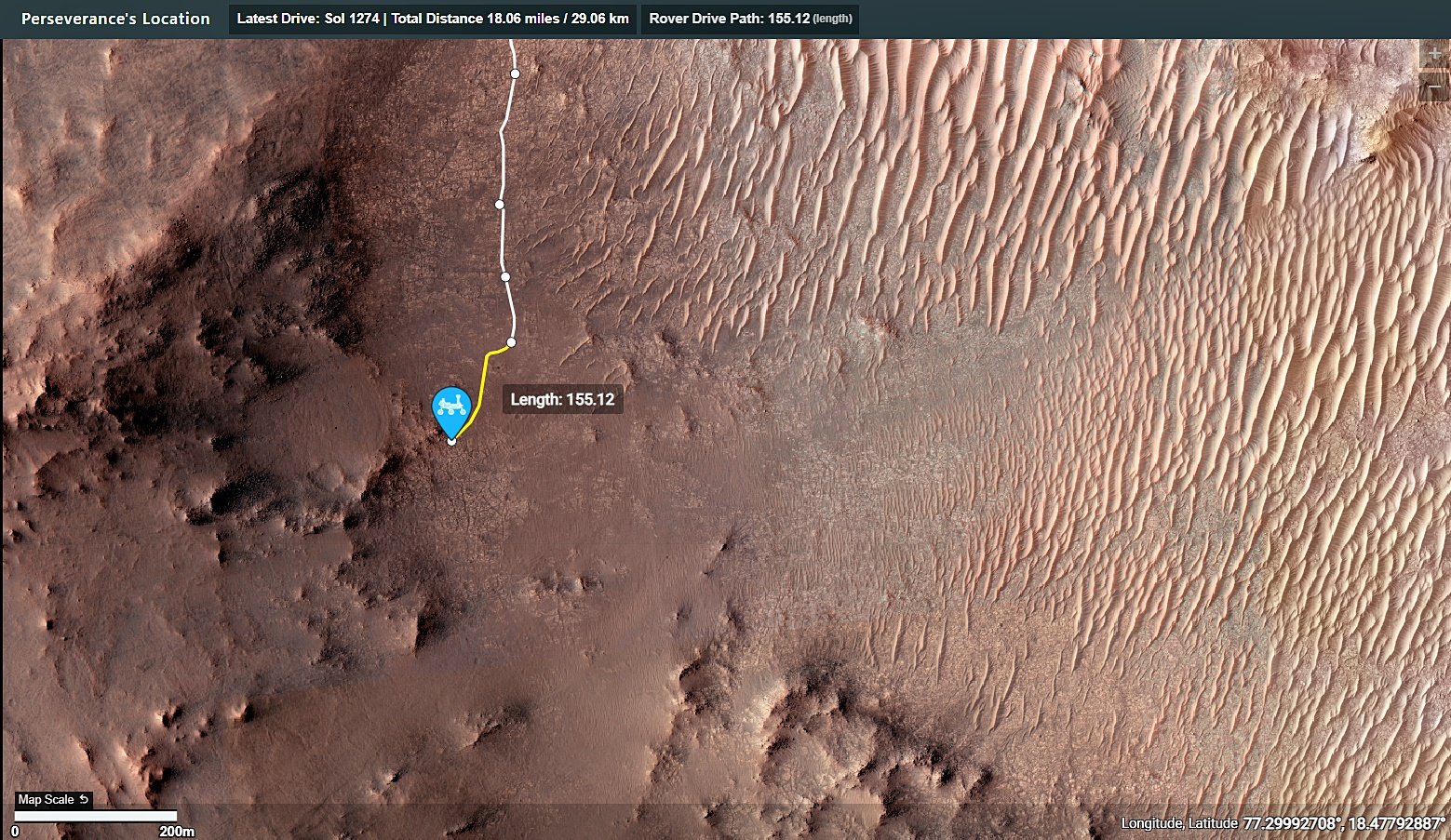
Awaiting the official distance and the updated traverse map.
Looking at the post drive images I presume that we are still on the margin unit, but very close to the basal unit of the crater rim (just beyond the workspace).
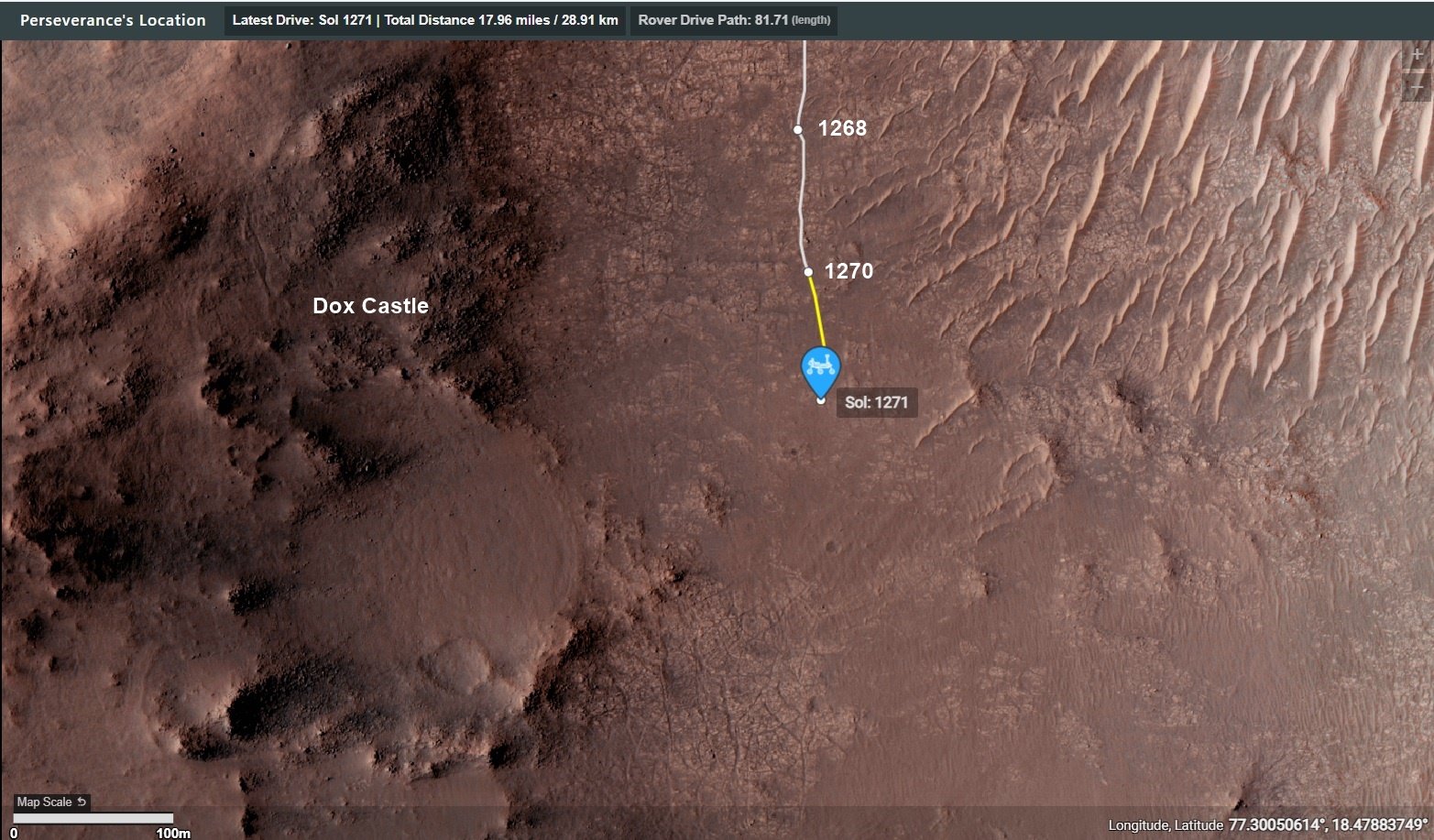
JPL stated that "Dox Castle" is a major science waypoint, but we're probably a little south of the location shown on an earlier map, but we are close to the transition zone.
Except for a series of short walkabout drives we could be around here for some time examining the transition between the rim and the rocks formed in the ancient lake. I'll share the official traverse map and drive data as soon as it is released.
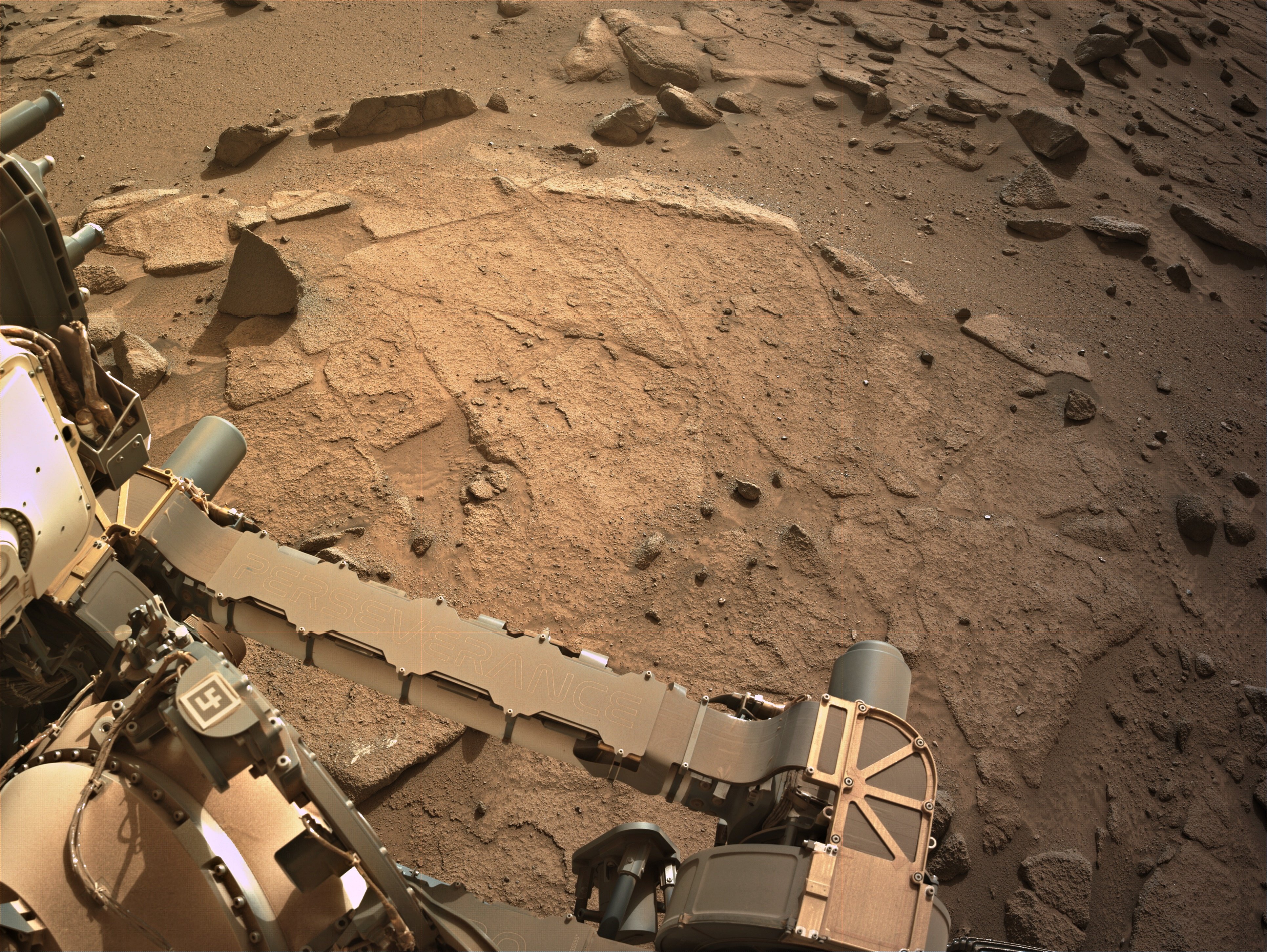
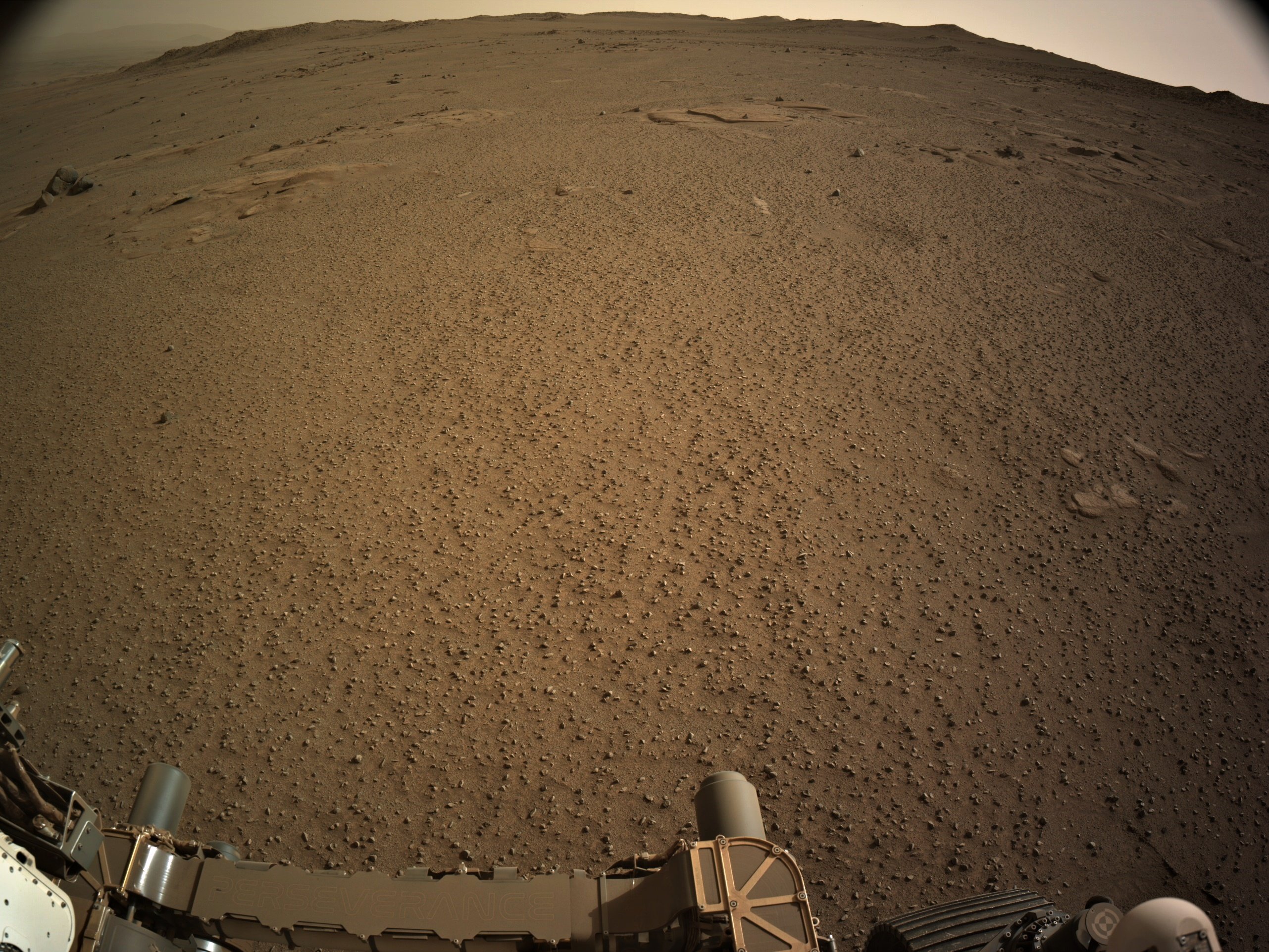
Attached is a 9-tile end-of-drive L-NavCam composite, featuring the rover's robotic arm workspace
Size - 3862x2902px
Assembled in MS-ICE.
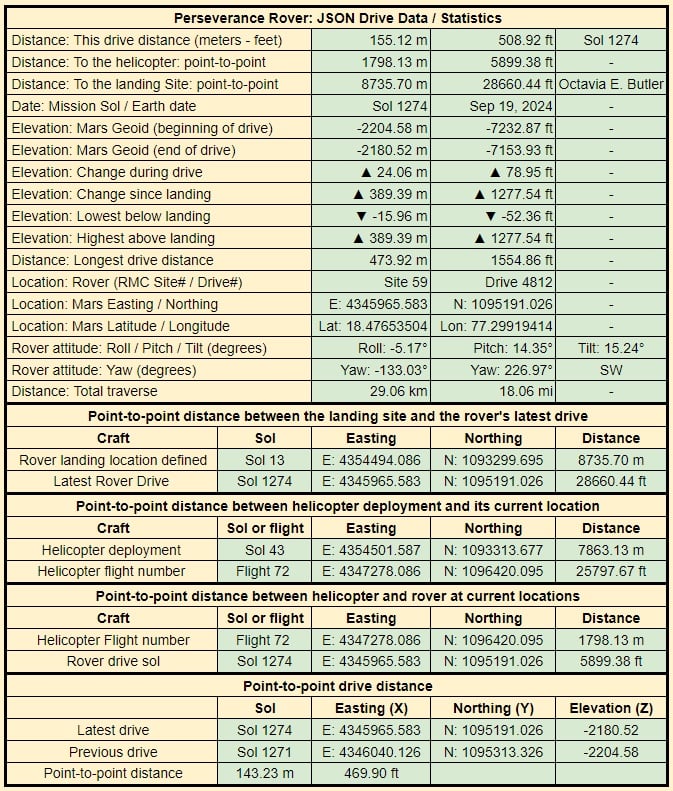
Site - 96-4812.
Sol 1274 - September 19, 2024.
Credits: NASA/JPL-Caltech





{kind=link}
It was, the climb on 1274 currently holds second place on the leader board, the highest elevation climb in a single drive is currently 26.4 meters (sol 1268), but that was over a marginally longer traverse, so probably a very similar average angle. I agree that the team have appeared to pause the drives whenever they spot an enticing target of opportunity :)
Pity we don't get frequent and detailed mission updates (Like we get on MSL). The PDS mission manager reports are amazing, but they are only made public at least 6 months after the 'event'